IsaacLab URDF转换USD脚本
IsaacLab 官方脚本
IsaacLab 内含URDF转换USD脚本
在 IsaacLab/scripts/tools/convert_urdf.py
激活环境以后,运行脚本并输入参数
1 | cd IsaacLab |
1 | # 运行脚本并加入args |
–merge-joints是开启把固定关节合并的功能
记得自行更换’/path/to/your/robot.urdf’和’/path/to/your/robot.usd’两个参数
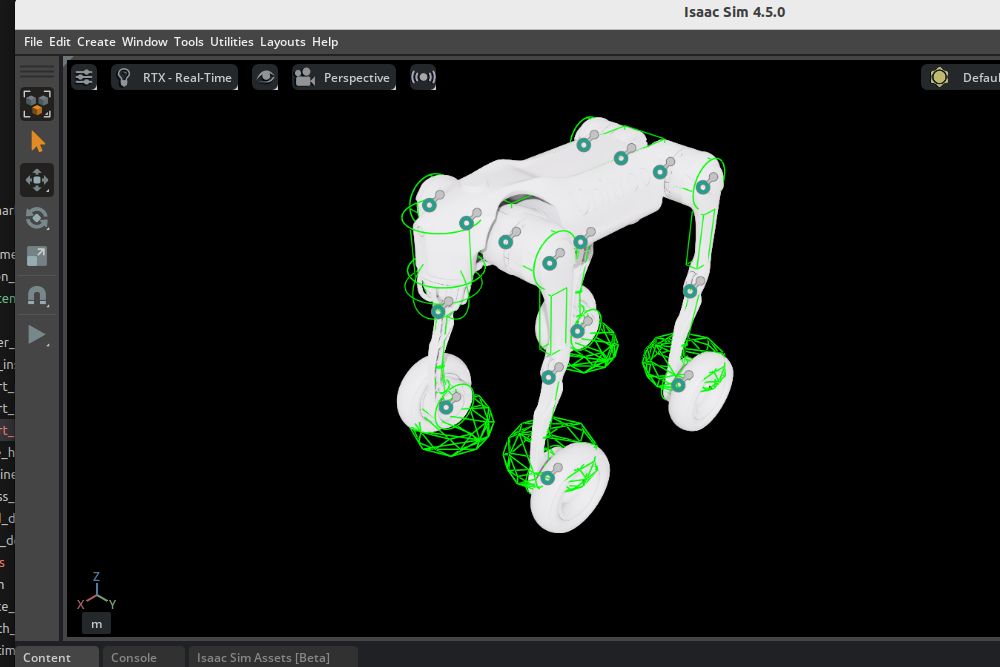
随后你可以倒入isaacsim查看usd模型
1 | # 打开isaacsim |
在下方的GUI里面选择
我这里使用了宇树官方提供的go2w urdf文件
但是官方提供的urdf文件本身碰撞体积就有问题,所以转换出的usd文件碰撞体积也有问题,我们需要在isaacsim里修改模型碰撞体积的旋转
tips:怎么打开查看碰撞体积
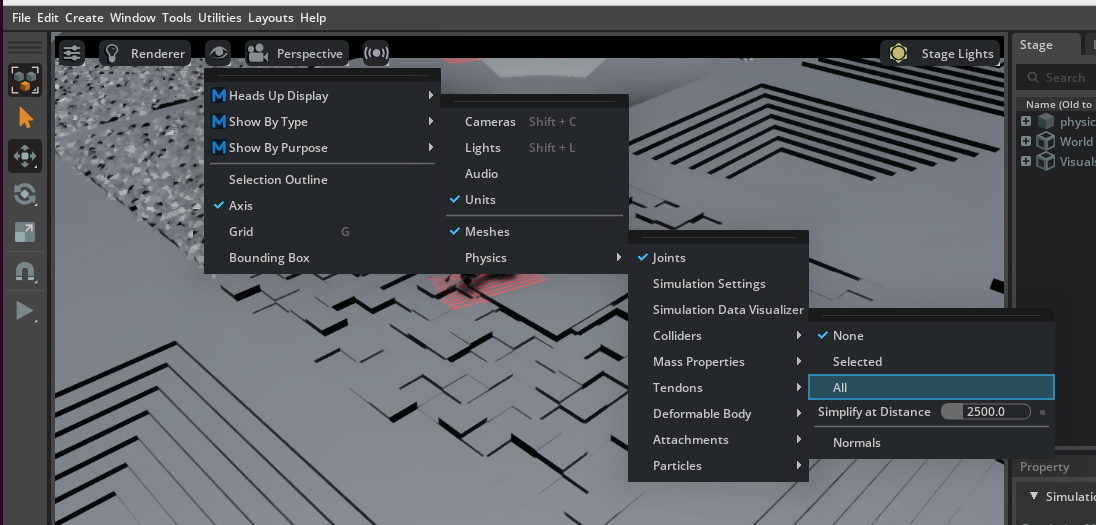
可以直接在右侧的prim树里面修改collisions来修正URDF的碰撞体积、
这里选择左前轮的collisions进行角度调整
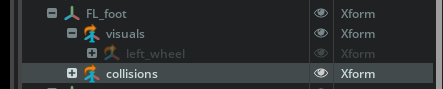
根据旋转的右手定则把左前轮绕红色的x轴旋转-90度
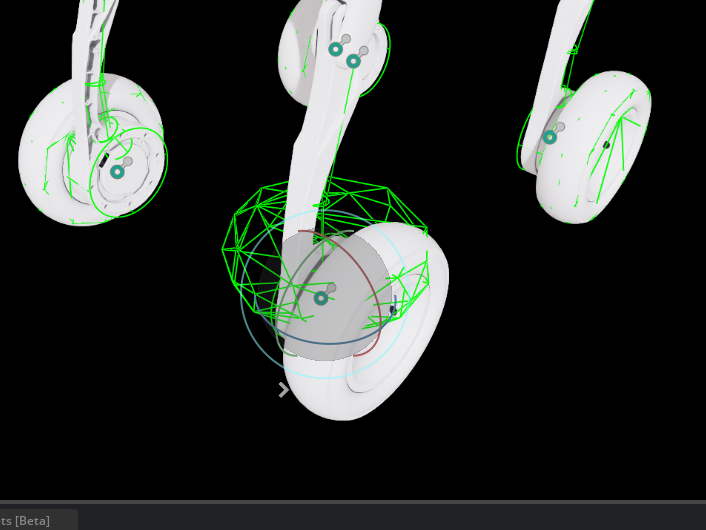

把四个轮子的碰撞体积旋转修改好后可以在isaacsim里直接看到效果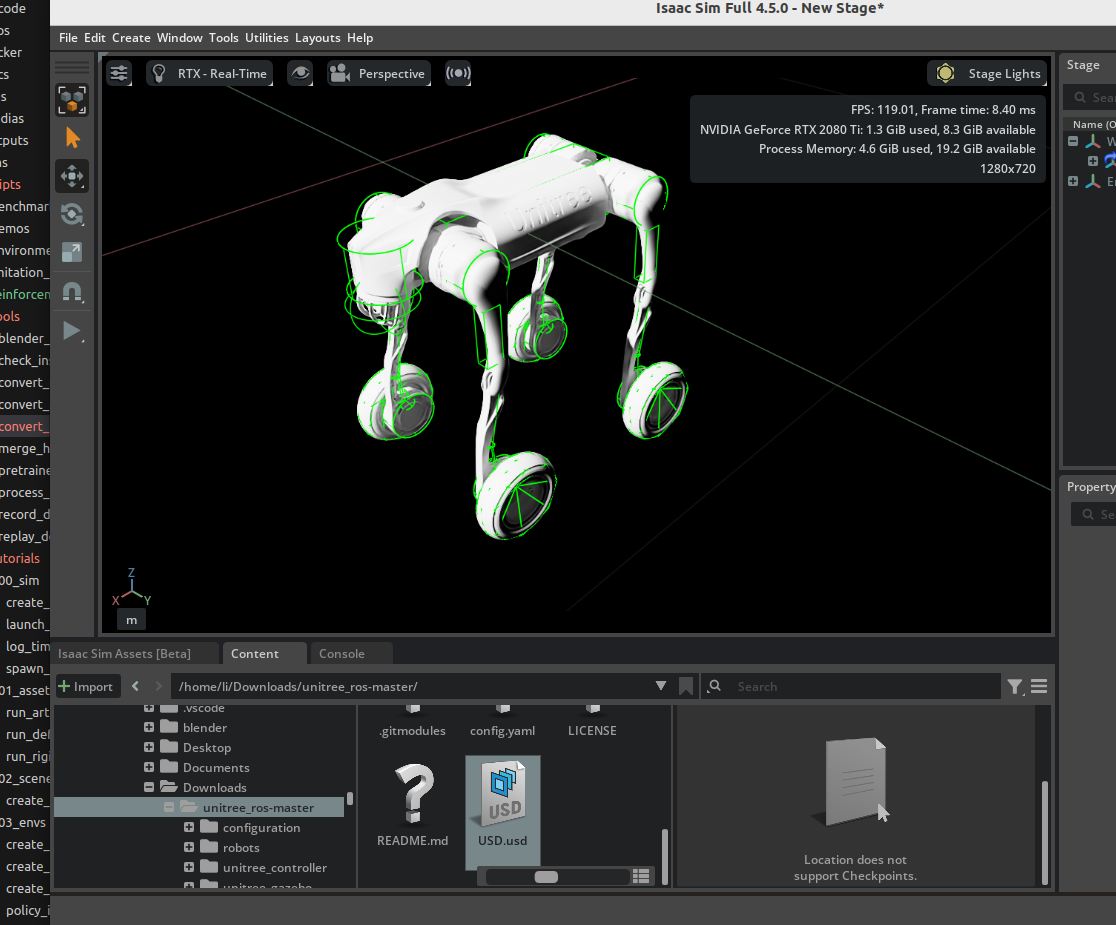
ctrl+s保存即可
–merg-joints的作用
这个选项的作用是把fixed的joint合并在一起,以提升刚体物理仿真运行速度,但有的时候如果你需要用这个fixed joint的时候,就不要开这个选项
温馨提示
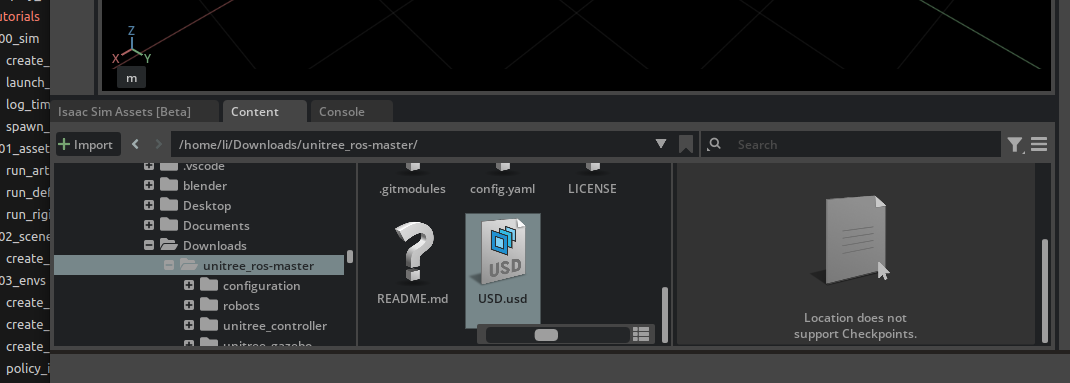
转完USD之后会在同级目录下生成三个文件(夹),如图所示
如果需要挪位置或者传递给别人,需要把这三个东西同时打包,并且位于同一文件夹下
本博客所有文章除特别声明外,均采用 CC BY-NC-SA 4.0 许可协议。转载请注明来源 Attic的博客!
 wechat
wechat alipay
alipay
相关推荐
2025-04-24
IsaacLab docker step by step
官方教程链接: IsaacSim docker 安装 IsaacLab docker 安装 Ubuntu 安装docker1234567891011# 使用官方docker脚本安装curl -fsSL https://get.docker.com -o get-docker.shsudo sh get-docker.sh# 设置用户组sudo groupadd dockersudo usermod -aG docker $USERnewgrp docker# 确认docker安装docker run hello-world 如果你在中国可能会遇到网络问题,从镜像源安装docker的方法请自行查找一下 构建isaacsim的docker镜像先要构建isaacsim的docker image 注意以下这里官方推荐安装535驱动,因为官方是在535驱动上测试的 123456789101112131415161718# 配置源curl -fsSL https://nvidia.github.io/libnvidia-container/gpgkey | sudo gpg...
2025-04-30
IssacSim-IsaacLab安装注意事项
遵循官网的安装指导,在第一次启动isaacsim\isaaclab时往往会遇到不少问题所以撰写了这篇文档 资产加载isaacsim默认的资产加载方式为从amazon云端下载 所以每次开启训练和演示时推荐打开你的魔法软件 当然如果你不使用官方提供的资产进行训练就没有这个问题 如果觉得打开魔法软件很麻烦,有三种方法解决这个问题 首先前往官网下载资产包,总共大概80GB(这个链接是4.5版本的资产)IsaacSim...